Doing scientific research is one thing, publishing and communicating the results is also very important. My scientific publications are listed here and we also created many video compilations in the different projects that I am involved in. Below is a more or less complete overview of the research videos (co-)created by me during my research at Robotics and Mechatronics, University of Twente.
The embedded videos are now hosted on YuJa. Some videos are also on my Vimeo channel (ad-free). My research group has a YouTube channel (with ads, unfortunately) and I also have a YouTube channel myself.
Total 31 video compilations. Per year: (2022:) 5, (2021:) 5, (2020:) 3, (2019:) 5, (2018:) 4, (2017:) 2, (2016:) 4, (2015:) 2, (2014:) 1.
Of these 31 compilations 26 were edited by myself; 5 by project students or colleagues.
Many compilations have music and/or voice-over. Most of these were composed/spoken by Tim de Man.
2024
Coming soon
2023
Coming soon
2022
Sunram 7 compilation
Presented by Harsh Ranjan at ICRA 2023 in Detroit, USA
This robot is the 7th generation robotic system for MRI-guided breast biopsy. Main improvements include a novel motor design for better robustness and printability, and various calibration options.
Can you 3D print a Turing-complete computer which runs on pressurized air? Yes! Although the number of states and bits is somewhat limited in this prototype.
First demonstrated at European Robotic Forum 2022, Rotterdam, The Netherlands.
The 4/2-way valve component can be downloaded at Printables. More components will be published later upon request.
Demonstrates 2-state and 3-state Busy Beaver. These are special programs for a binary Turing machine which gives the maximum possible output given the number of available states.
(Supplementary video to the main Pneumatic Turing Machine compilation)
The motor is driven by four cylinders using only five pneumatic lines in total. Each of the six output shafts have a positioning accuracy of two steps. This is a consequence of the design with shared cylinders.
This video shows several steps in the workflow such as path planning, ultrasound scanning, 3D ultrasound reconstruction, biopsy planning, needle insertion and sample validation. Deformations of soft tissue are taken into account.
Although a hobby project, a combination of this device and Sisyphus spool holder are currently used at RaM for feeding one of our multi-material 3D printers.
Sunram 5: An MR Safe Robotic System for Breast Biopsy.
Improvements over Sunram 4 include dual-speed motors, a biopsy gun, an emergency needle ejection feature and a curved rack for better angulation of the needle towards the breast.
Visualization of breast phantom and lesions with Hololens
BSc project by Leon Klute, supervised by Vincent Groenhuis.
The needle is tracked using either a stereo camera or an NDI electromagnetic tracker (from 0:31), and visualized in the scene together with the phantom and lesion(s) using augmented reality.
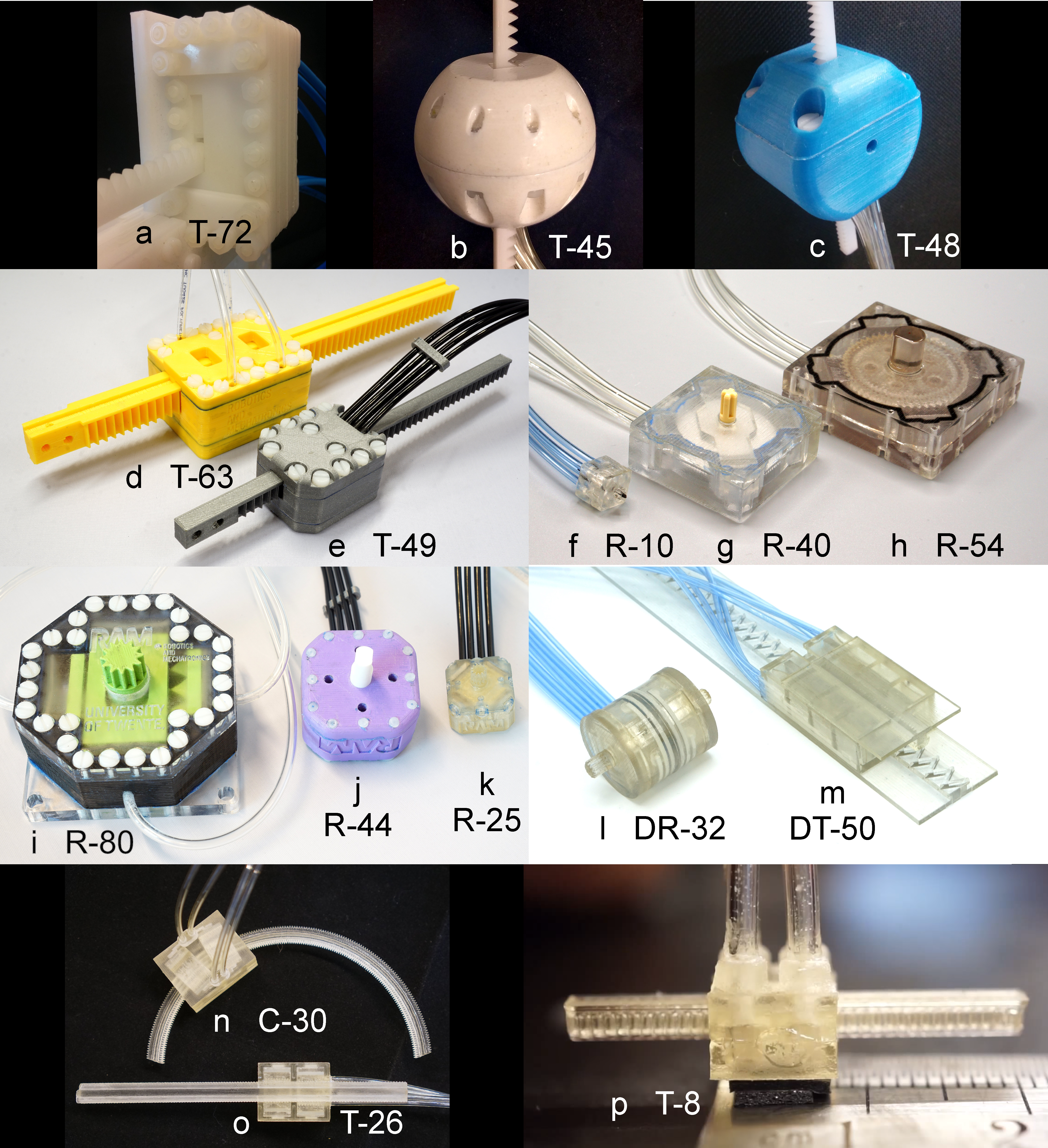
Many pneumatic stepper motors, rotary engines and other pneumatic devices were developed during our research. Several were published in research papers and/or 3-D model websites. This page lists nearly all of them, alongside with the most important properties and a link to the downloadable model (if available). If a motor design is not yet downloadable then you can send me a request for it.
Certain motors have extensive printing and assembly instructions and/or a video compilation. If you are interested in 3-D printing one of these motors then there should be plenty of information and designs to start with.
At the moment I subdivided the motors into five categories: linear, rotational, curved, rotary engine and dual. The motor name consists of a character (or two in case of dual-speed) plus a number and sometimes a postfix.
First character(s): T=linear, R=rotational, C=curved, D=dual, H=hollow. The following number indicates the major dimension (length or diameter) of the motor, in mm. The “B” postfix indicates a redesign of an existing model.
In theory it is possible to scale any design along (some combination of) its axes. This should work with some experimentation.
If you need help with a motor then you can post a comment on the associated Printables or Thingiverse (or MyMiniFactory) webpage, and I will look into it. You can also contact me directly at v.groenhuis@utwente.nl. If you designed something cool based on these designs then I am always happy to see it!
Designs are for non-commercial use only (i.e., research, education, hobby). Contact me for IP related questions.